ASCENT
AutonomouS Control and ENgine Technology Platform
The chair of Space Mobility and Propulsion launched the ASCENT project in 2024. ASCENT is
a free-flying, vertical-takeoff, vertical landing platform
propelled by a ~3kN hot gas propulsion system. ASCENT aims to bridge the gap between
academic research and technology development. In particular, we want to demonstrate our
fault-tolerant control strategies on a fully integrated propulsive landing vehicle.
An overview of technical development steps and highlights follows below.
System Design
ASCENT was initiated on a blank sheet of paper. I developed the system architecture using a model-based
design approach to handle the strong coupling between propulsion, structure, tanks, avionics, and control.
To support rapid iteration under uncertainty, I implemented HopIt a Python-based design framework
that computes feasible system configurations from high-level mission parameters. The tool resolves the
implicit coupling between subsystems through fixed-point iteration and Newton-type solvers and enables early-stage sensitivity analyses.
This approach revealed the dominant design levers driving system mass and directly informed component-level
requirements. Parts of this methodology and its results have been published.

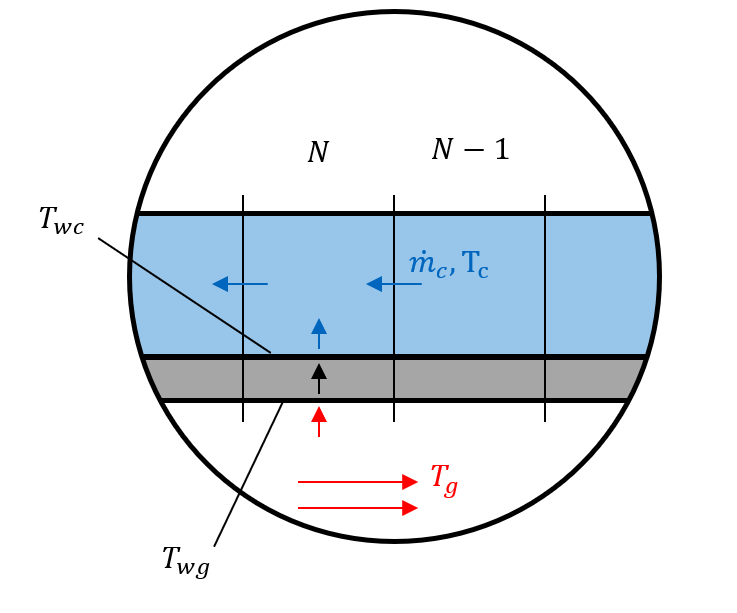
Thermal Constraints
Thermal feasibility is a key boundary condition for the ASCENT propulsion system, with combustion temperatures exceeding 3000K. In order to evaluate feasible cooling options, I implemented THERMAT, a 1D flow and wall heat transfer solver that includes regenerative cooling for variable cooling geometries. With the help of THERMAT we were able to identify regenerative cooling with the fuel (Ethanol) as a feasible option to ensure thermal integrity of the thrust chamber. Hence, with the help of THERMAT I was able to constrain the feasible oxidizer to fuel ratio while also capturing requirements regarding local coolant heat transfer peaks to avoid thermal hot spots in certain sections of the thrust chamber. This way THERMAT supports both system-level trade studies and detailed thrust-chamber design
GNC Demonstrator
To de-risk flight control development, we developed the eHopper together with WARR, a low-cost, propeller-driven subscale
demonstrator. Its dynamics are scaled to ASCENT using Buckingham-Pi similarity, enabling meaningful controller validation.
More importantly, the eHopper serves as a testbed for the full GNC hardware and software stack later deployed on ASCENT.
Operating at significantly lower cost and risk, it allows rapid iteration and debugging.
The avionics stack centers around a Raspberry Pi 5 companion computer and a Pixhawk for state estimation and actuator interfacing.

Flight Control
The ASCENT Hopper is an underactuated system with dynamically coupled longitudinal and rotary states. The dynamics can be
thought of as an inverted pendulum with two rotary degrees of freedom, rendering the open loop dynamics naturally unstable.
In order to achieve agile flight trajectories while ensuring stable tracking of the trajecory and hover flight, we
decompose the problem into a motion planning step and subsequent trajectory tracking. The planner formulates trajectory
generation as a nonlinear optimization problem in CasADi, exploiting differential flatness while respecting physical limitations of the Hopper.
The resulting trajectories are tracked by a dedicated feedback controller (QP-based MPC). The development was mainly carried out by two students
under the lead supervision of Jon Arrizabalaga and co-supervised by me.
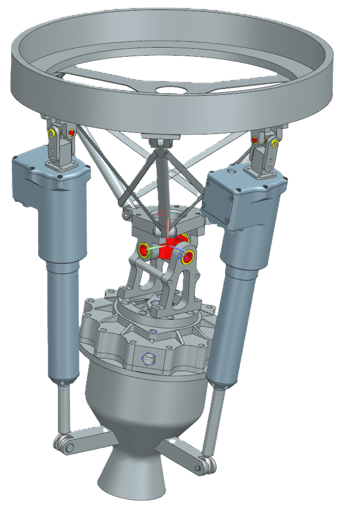
Thrust Vector Control System
The thrust vector control system translates guidance commands into physical thrust deflections. A central bearing enables two rotational
degrees of freedom, actuated by two orthogonal linear actuators.
The system achieves full deflection within 0.5 s, enabling agile maneuvers and stable hover flight.
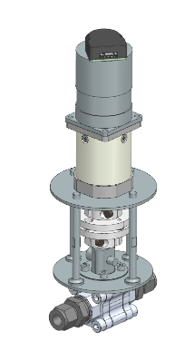
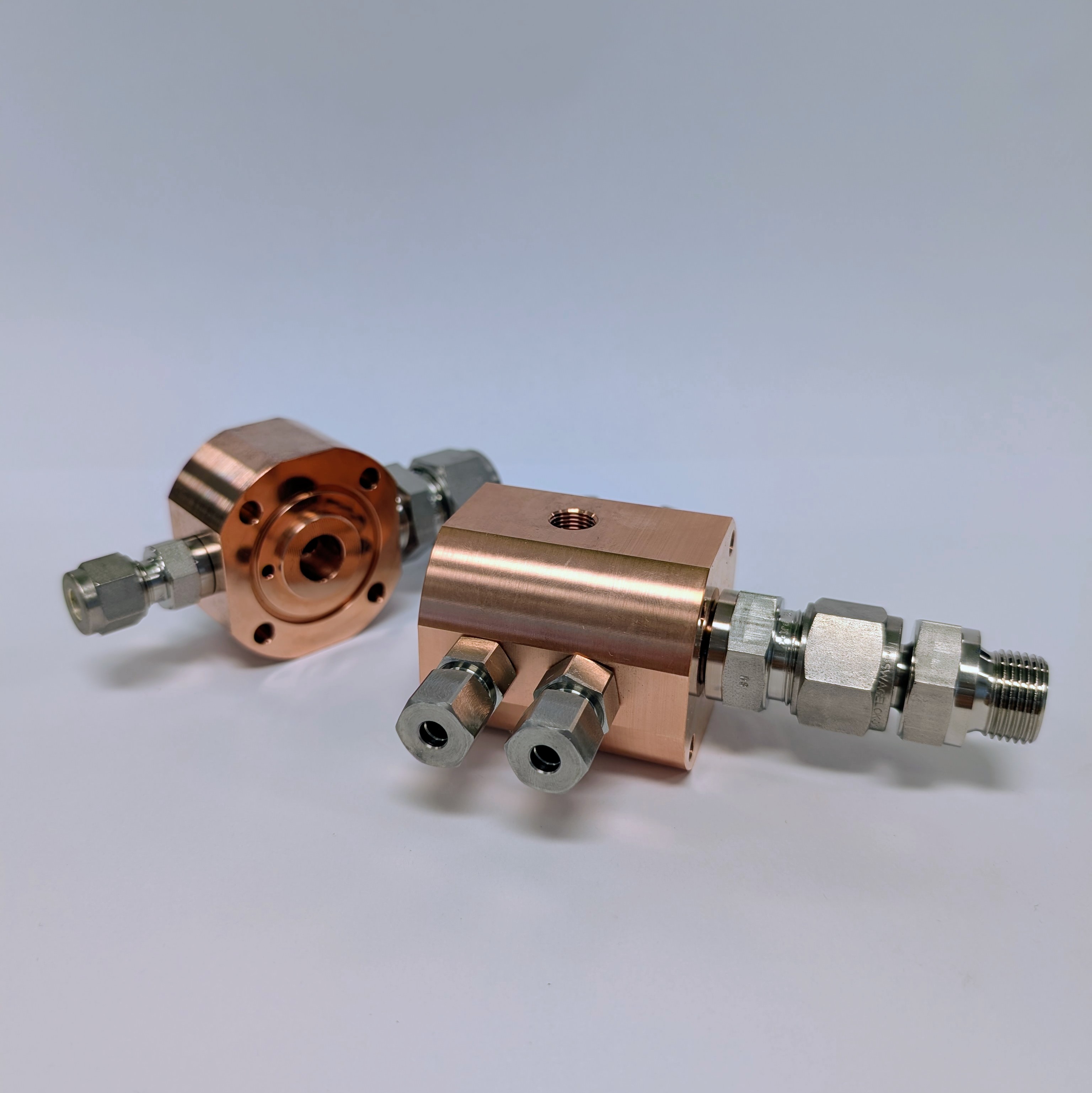
Throttling Valves
Precise trajectory tracking requires control over both thrust direction and magnitude. Thrust is regulated
via independently actuated throttling valves in the oxidizer and fuel feed lines, allowing simultaneous
thrust modulation and mixture-ratio control.
As no suitable off-the-shelf solution existed, manually operated valves were augmented with BLDC motors to
achieve the required remote control authority bandwidth.
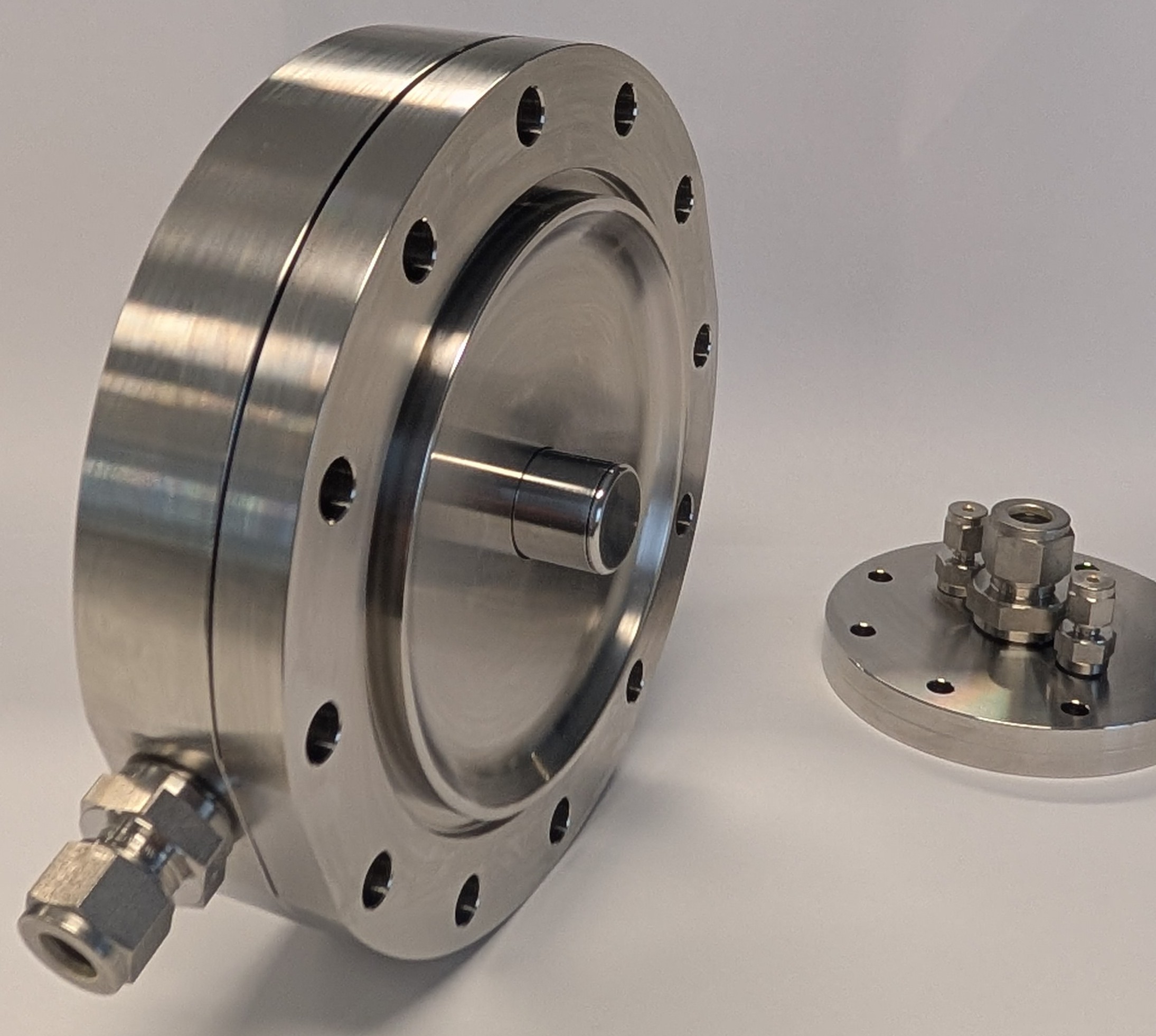
Injector
Initial trajectory and system design studies indicated a required thrust range of 40–100%. A pintle injector was selected due to its
stable operation over a wide throttling range.
I designed the injector based on a preliminary student developed iteration. To ensure stable operation across the desired operational envelope,
the design is optimized for robustness against mass-flow deviations resulting from manufacturing tolerances.
Manufacturing is ongoing, with cold-flow testing planned for April 2026.
Ignitor
Propulsion Test Bench
Prior to integration, the propulsion system is characterized on a dedicated cryogenic bi-liquid test bench.
The facility supports thrust levels up to 4 kN and tank pressures up to 80 bar.
I designed the test bench structure, fluid system, and instrumentation layout. It enables cold-flow,
hot-fire, throttling, and thrust-vectoring experiments. Assembly and commissioning are currently ongoing, supported by our technical staff.
